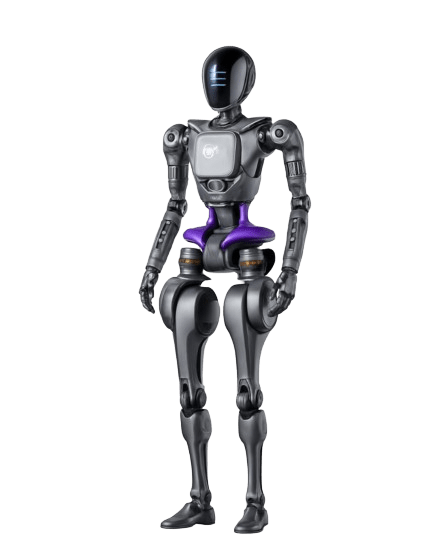
GR - 1
Humanoid robotic assistant aimed versatile embodied AI tasks
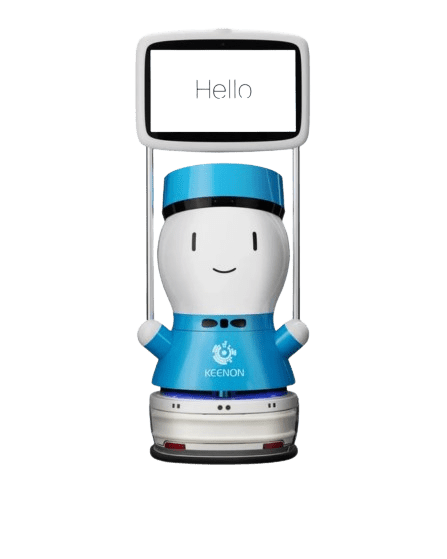
MINI
Compact AI service robot designed for flexible greeting and navigation
NOVA
Autonomous GreetingBot Nova for reception, tours, and interactive guidance
G2
Autonomous G2 robot for interactive advertising and customer guidance